 Die Last kann mit Hilfe des Drehmoments und der Geometrie eines Kegelrads oder Hypoidrads definiert werden.
Die Last kann mit Hilfe des Drehmoments und der Geometrie eines Kegelrads oder Hypoidrads definiert werden.
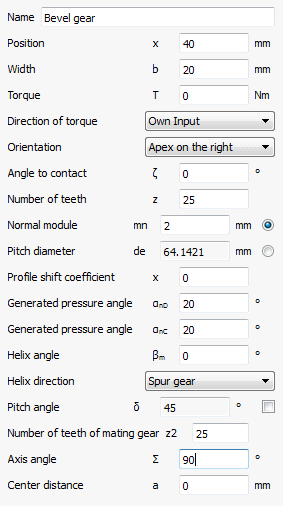
Die Richtung des Drehmomentes kann entweder durch sein Vorzeichen oder durch die Auswahl "Welle wird angetrieben"/"Welle treibt an" definiert werden. Der Kontaktpunkt wird durch einen Winkel zum Kontakt angegeben, der auf der y-Achse Null und auf der z-Achse 90° beträgt.
Der Teilkegelwinkel kann entweder direkt definiert werden oder er wird über den Achswinkel und die Zähnezahl des Gegenrades berechnet.
Anstelle des mittleren Normalmoduls kann auch der Teilkreis aussen als Eingabe verwendet werden.
Die Breite ist die Breite des Zahnrads (die Länge der Flanke), die axiale Länge der belasteten Welle ist abhängig vom Teilkegelwinkel kleiner.