


Seit Version 08/2016 erlaubt die MESYS Wellensystemberechnung die Kopplung von elastischen Wellen, die als 1D-Balkenelements berücksichtigt werden, mit 3D-elastischen Bauteilen berücksichtigt über 3D-Solidelemente. Die 3D-elastischen Bauteile können als CAD Geometrie importiert werden oder parametrisch definiert werden.
Die 3D-elastischen Bauteile wurden bislang zu einzelnen Knoten an der Schnittstelle zum Wellenmodell kondensiert. Die nächste Version der Wellensystemberechnung erlaubt zusätzlich die Kopplung der Verformung von Oberflächen für Verzahnungen und Wälzlager. Die Verformung eines Gehäuses führt dann zu Verformungen von Lagerringen und von Radkörpern von Zahnrädern. Als erstes Beispiel zeigt Bild 1 die Deformationen in einer Planetenstufe mit 3D-elastischem Planetenträger, Planet und Hohlrad.
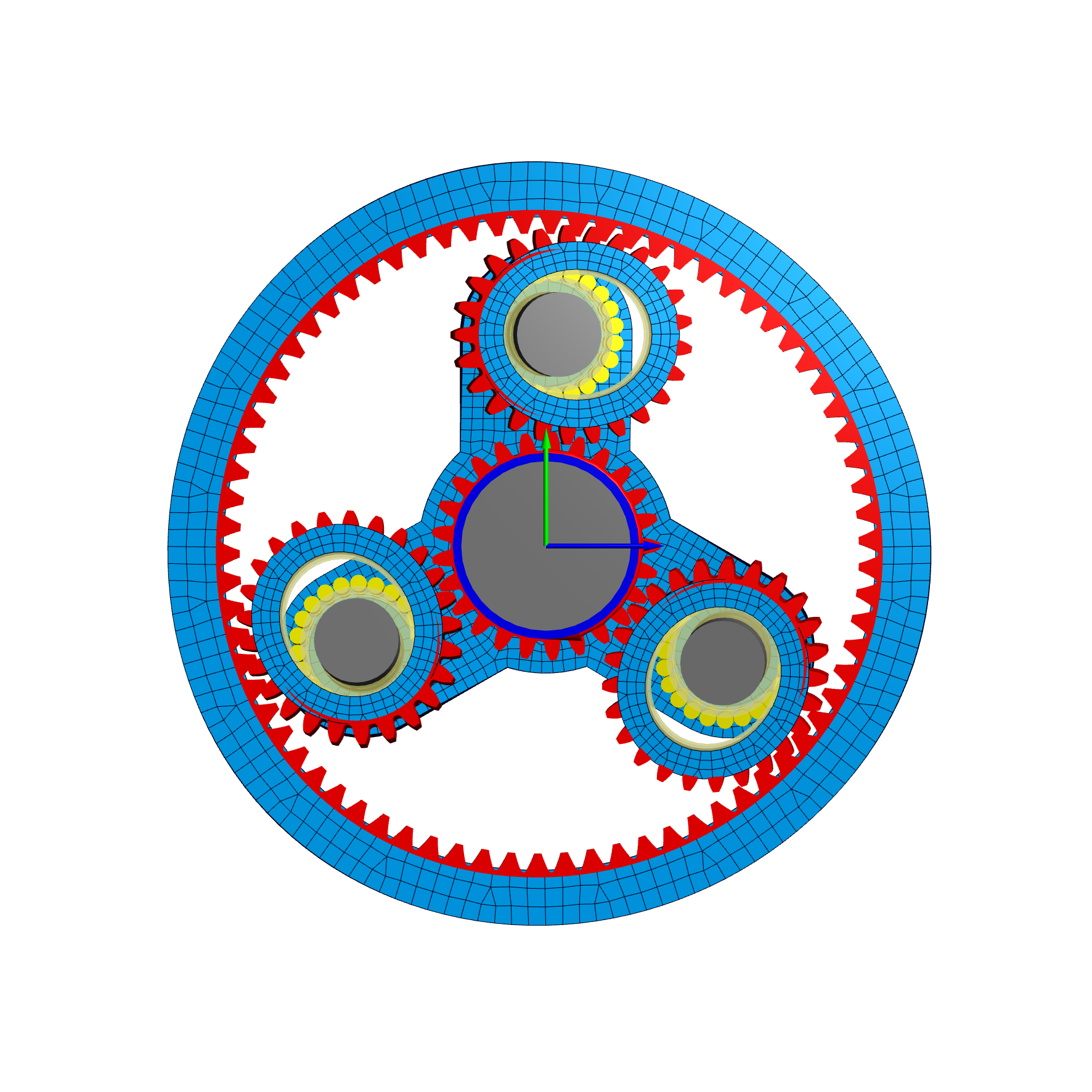
Bild 1: Planetenstufe mit 3D-elastischem Planet, Hohlrad und Planetenträger
Verzahnungskräfte führen zu Verformungen von Radkörpern, was wiederum die Lastverteilung auf der Flankenlinie beeinflusst, wenn der Radkörper nicht gleichmässig verformt wird. Der Einfluss der Radkörperverformungen auf die Linienlastverteilung von Stirnrädern wird am Beispiel einer einfachen Welle im Folgenden dargestellt.
Das Berechnungsbeispiel ist eine Welle mit zwei starren Stützen. Einmal mit zentrischem Zahnrad und einmal mit einem Versatz für das Zahnrad.
In ISO 6336-1 Abschnitt 7.4.3.2 wird vorgeschlagen den mittleren Durchmesser von Kopf- und Fusskreis für die Berechnung der Biegeverformungen zu verwenden und den Fusskreisdurchmesser plus 0.4*Modul für Torsionsverformungen. Hier wird ein gerundeter Wert von 48mm dazwischen verwendet (z=25, mn=2). In Abschnitt 7.4.3.3 gibt die Norm noch an, dass für die Versteifung der Welle durch Verzahnungen oder Verbindungen mit Pressitz ein mittlerer Durchmesser von Bohrungsdurchmesser und Nabendurchmesser verwendet werden kann. Dieser mittlere Durchmesser sollte nur für die Versteifung der Welle verwendet werden und nicht für die Berechnung der Verformung der Flankenlinie, wie auch an den Ergebnissen unten ersichtlich ist.
| Fall | Abbildung | Kommentar |
|---|---|---|
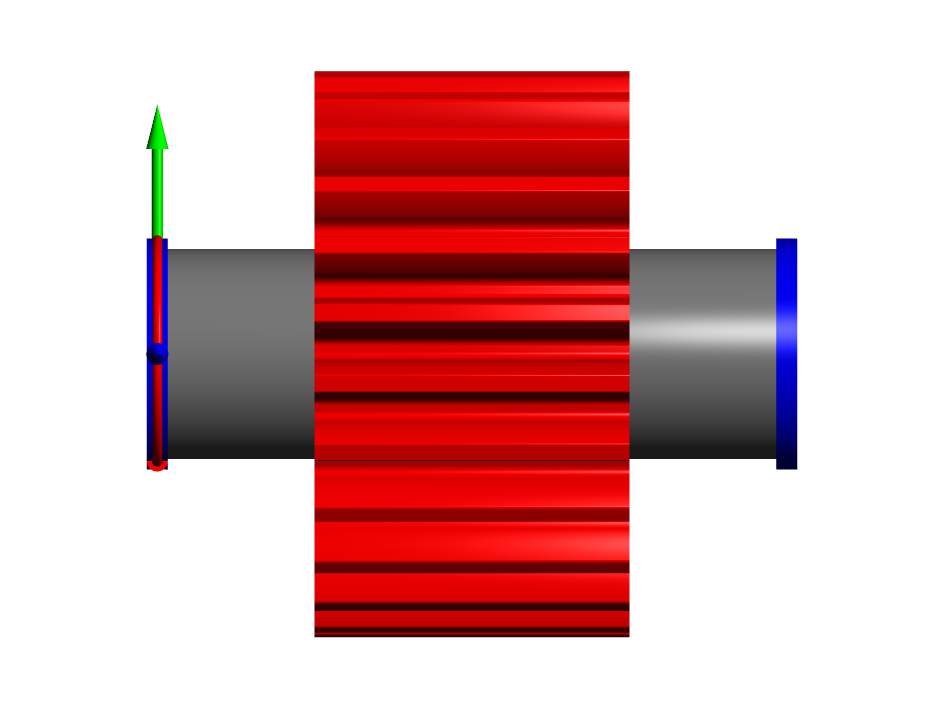
| 1 | 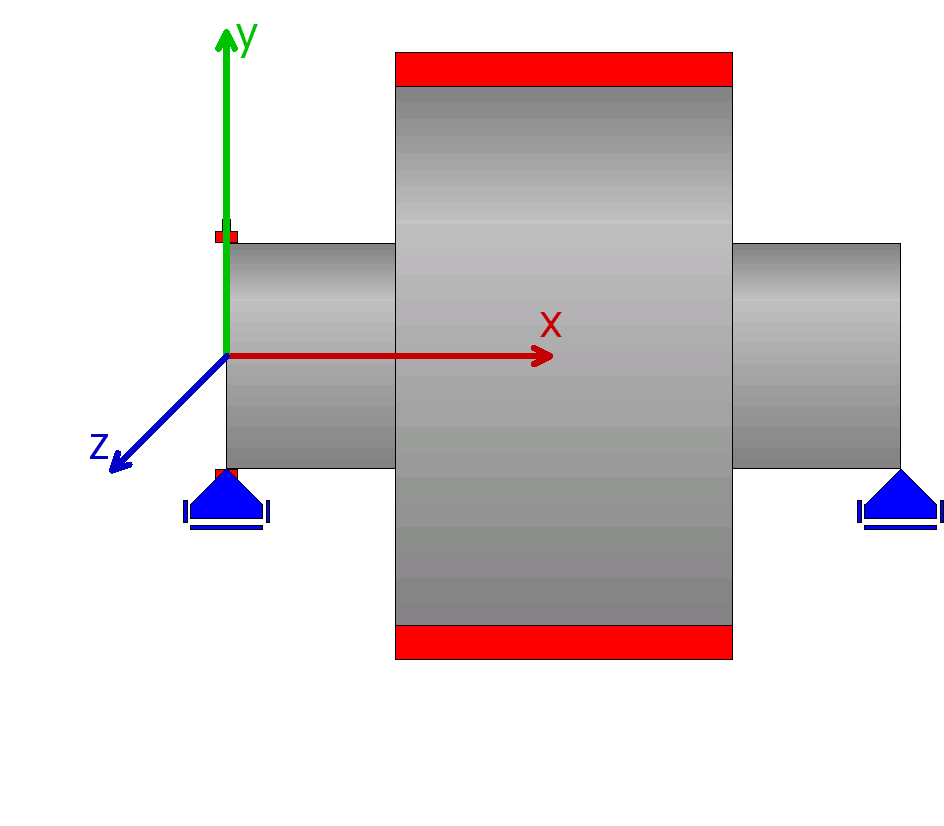 |
Der Wellendurchmesser im Bereich der Verzahnung wird auf einen Durchmesser zwischen Fuss- und Kopfkreis erhöht. |
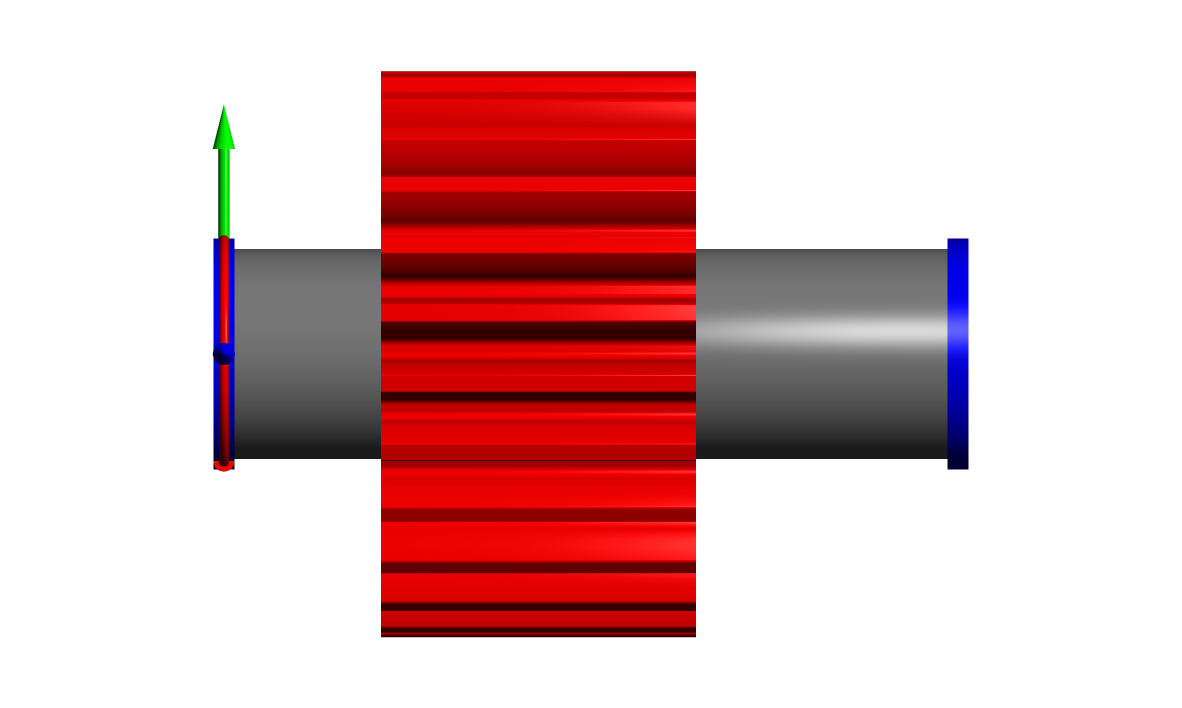
| 2 | 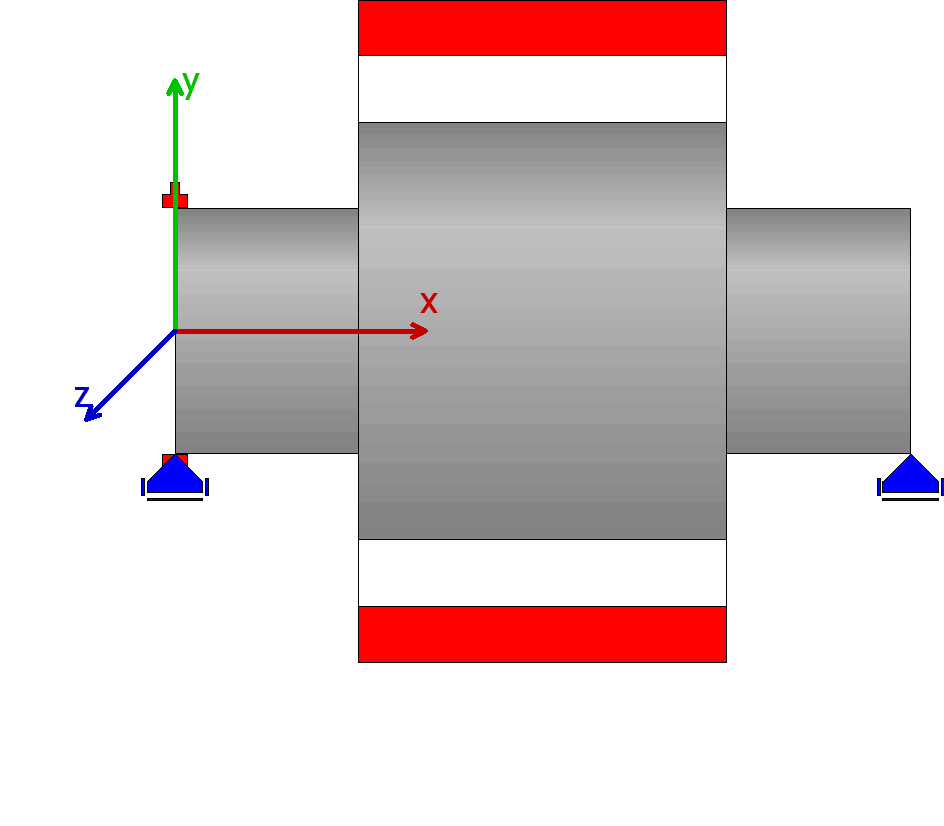 |
Der Wellendurchmesser wird auf den Mittelwert von (20+48)/2=34mm erhöht. |
| 3 | 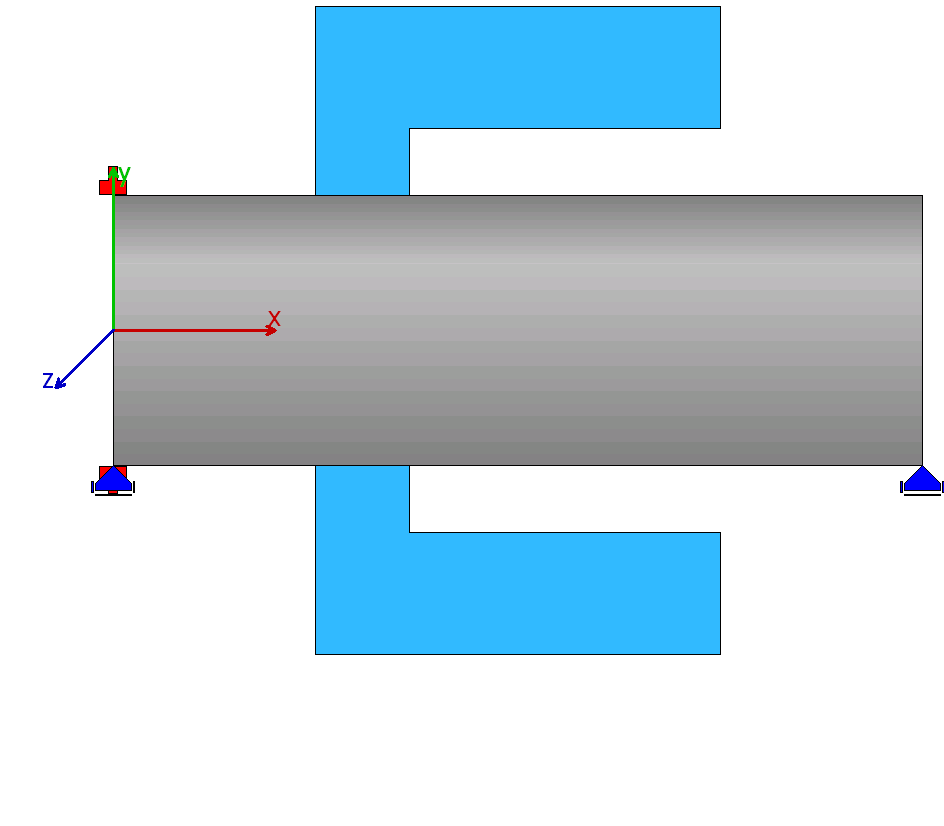 |
Ein unsymmetrischer Radkörper mit Steg links wird verwendet. |
| 4 | 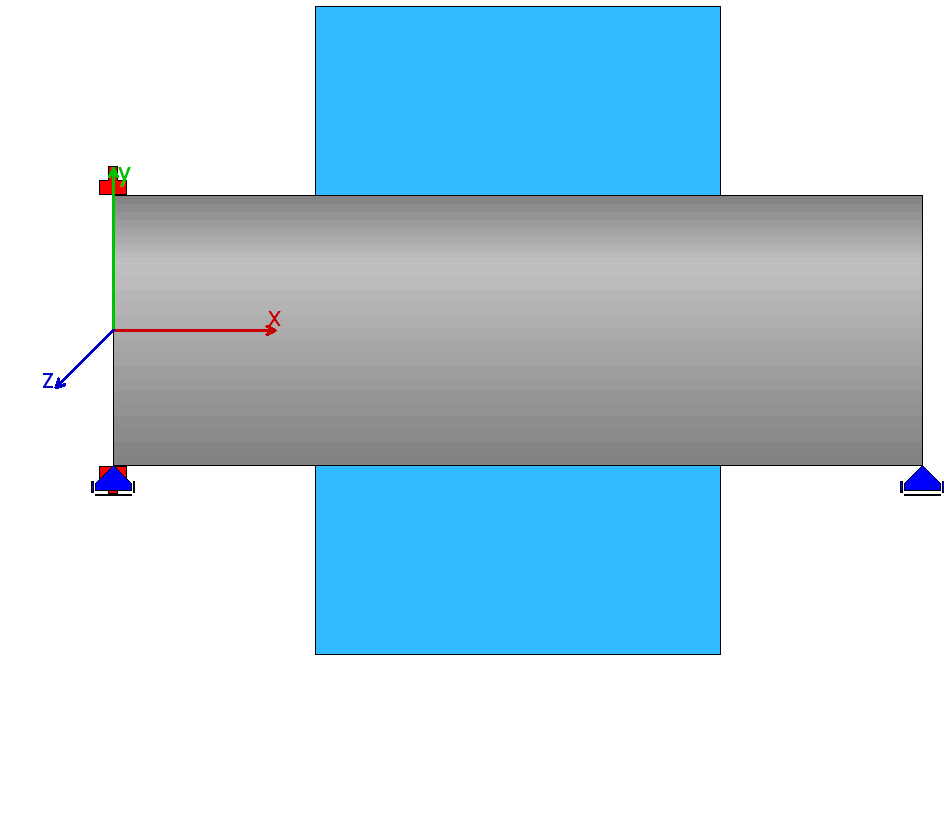 |
Ein Vollzylinder als Radkörper wird verwendet. |
| 5 | 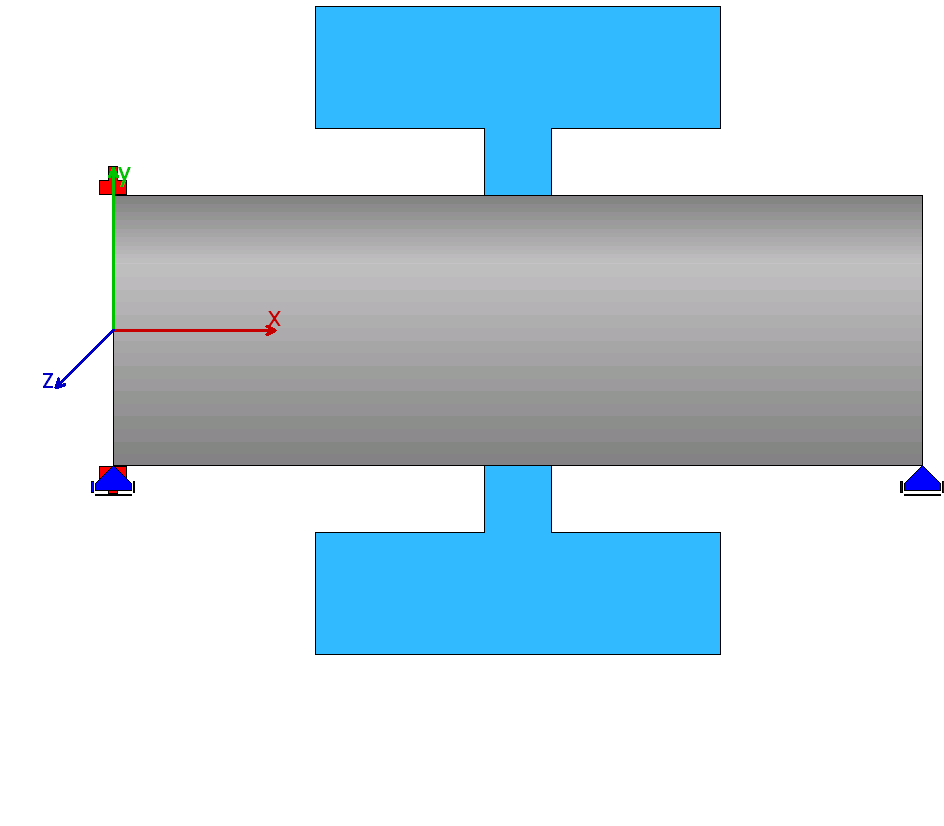 |
Ein Radkörper mit Steg in der Mitte. |
| 6 | 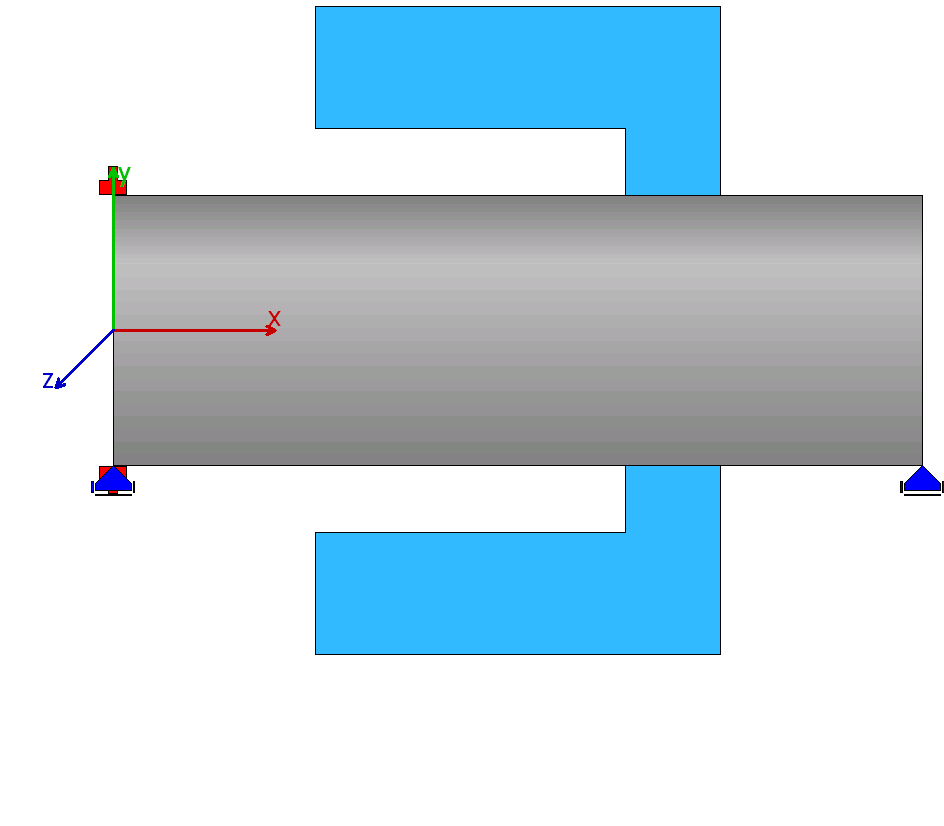 |
Der Fall 3 wird gespiegelt und mit Steg rechts verwendet. |
Für die Berechnung der Verformungen der Verzahnungen sind die Zahnräder im Eingriff mit einem zweiten starr gelagertem Zentralrad. Alle sechs Beispielwellen sind mit dem Zentralrad im Eingriff und werden mit dem gleichen Drehmoment von der linken Seite belastet.
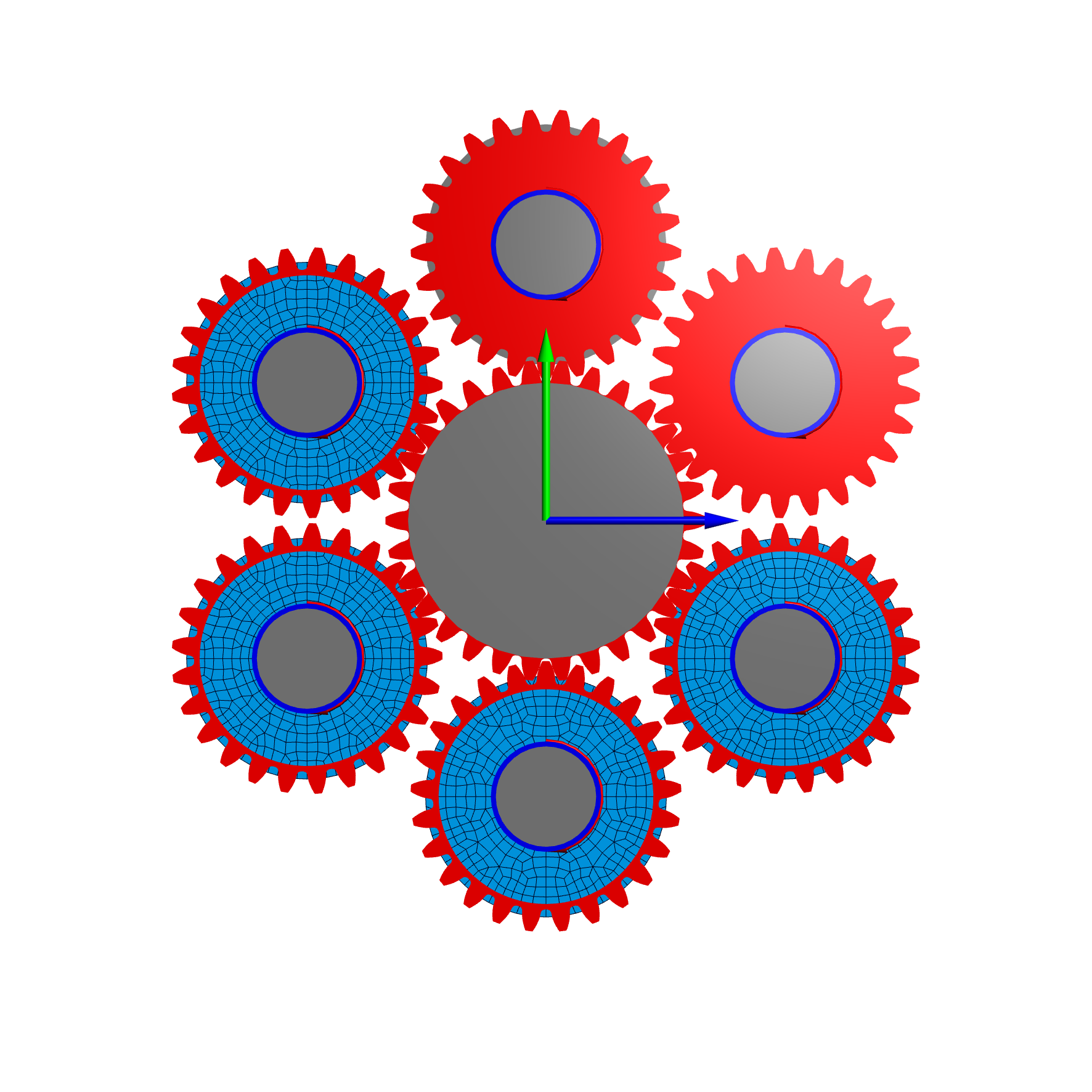
Bild3: Wellensystem für die Beispielberechnungen
Die Resultate werden für das zentrische Zahnrad und für den Fall mit Versatz in folgender Tabelle angegeben:
| Zentrisches Zahnrad | 1 | 2 | 3 | 4 | 5 | 6 |
| Maximale Wellendurchbiegung [µm] | 6.5 | 8.3 | 26.1 | 9.8 | 26.8 | 26.1 |
| Linienlast wmax [N/mm] | 311 | 382 | 566 | 296 | 288 | 566 |
| Verhältnis wmax/wavg | 1.10 | 1.34 | 2.00 | 1.04 | 1.01 | 1.99 |
| Spaltweite [µm] | 1.6 | 6.0 | 27.6 | 0.8 | 0.0 | 27.6 |
| Exzentrisches Zahnrad | 1 | 2 | 3 | 4 | 5 | 6 |
| Maximale Wellendurchbiegung [µm] | 12.8 | 14.4 | 35.6 | 17.6 | 39.4 | 41.6 |
| Linienlast wmax [N/mm] | 350 | 423 | 630 | 339 | 333 | 535 |
| Verhältnis wmax/wavg | 1.23 | 1.49 | 2.22 | 1.19 | 1.17 | 1.89 |
| Spaltweite [µm] | 5.4 | 9.9 | 34.4 | 5.1 | 5.6 | 24.6 |
Die maximale Wellendurchbiegung wird für die innere Welle angegeben, ohne Verschiebungen des Radkörpers. Das Verhältnis wmax/wavg ist ähnlich dem Breitenlastfaktor des Radpaares, allerdings sind nur lastabhängige Effekte berücksichtigt und kein Einfluss von Toleranzen. Zusätzliche Herstelltoleranzen oder Nachgiebigkeiten der Lager würden zu grösseren Breitenlastfaktoren führen. Die Spaltweiten werden aus den Deformationen der Flankenlinien bestimmt, indem das Zahnrad virtuell zurückgedreht wird, bis es nur noch an einem Punkt Kontakt hat. Sie entsprechen den Verformungen der Flankenlinien.
Fall 1 und 4 verwenden beide einen Vollzylinder als Radkörper. Die Wellendurchbiegung im Fall 4 ist grosser als bei Fall 1, allerdings sind die Flankenlinienverformungen in Fall 4 kleiner als bei Fall 1. Der Grund ist, dass sich die Welle im Radkörper verformen kann. Allgemein ist ein Balkenmodell zu steif im Fall von Querschnittsänderungen. Viele Programme zur Rotordynamik verwenden daher einen Kegel für den Steifigkeitsdurchmesser bei Querschnittsänderungen. Das 3D-Volumenmodell berücksichtigt die Spannungsverteilung automatisch an der Stelle von Querschnittsveränderungen ohne dass versteifende Durchmesser oder Kegelwinkel geschätzt werden müssen.
Fall 2 mit einem mittleren Durchmesser für den Radkörper ist nicht sinnvoll für die Berechnung von Flankenliniendeformationen, wie der Vergleich mit Fall 5 zeigt. Bei einem Pressverband zwischen Welle und Radkörper wird die Welle weniger stark versteift, wie auch in Fall 5, wo keine Versteifung erfolgt. Trotzdem ergibt sich in Fall 5 eine sehr kleine Verformung der Flankenlinie. Das Berechnungsmodell mit dem mittleren Durchmesser ist nur sinnvoll, wenn die Biegelinie der Welle das Ziel der Berechnung ist. Die Durchbiegung in Fall 2 nähert sich auch Fall 4 an, während das für die Flankenlinienverformungen nicht der Fall ist.
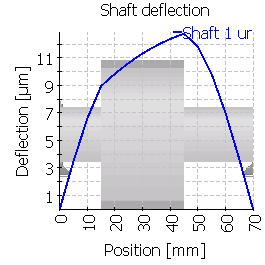
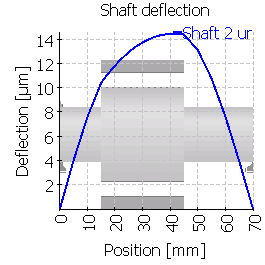
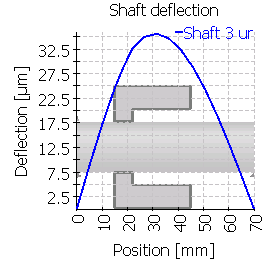
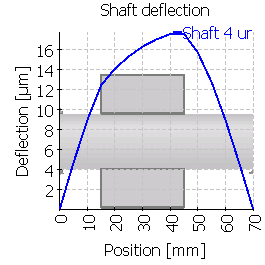
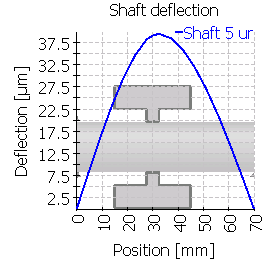
Folgende Tabelle zeigt die Biegelinie für die sechs Fälle, je mit zentrischem und exzentrischem Zahnrad. Die Skalierung der Grafiken ist jeweils unterschiedlich.
| Wellendurchbiegung | Zentrisches Zahnrad | Exzentrisches Zahnrad |
|---|---|---|
| 1 | 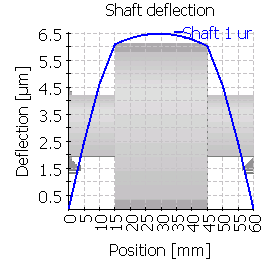 |
 |
| 2 | 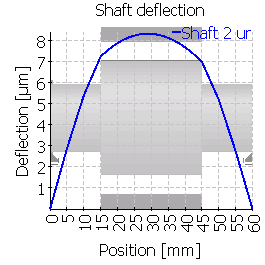 |
 |
| 3 | 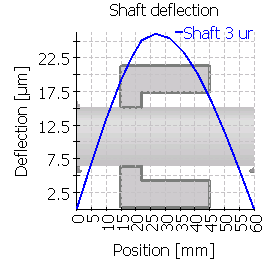 |
 |
| 4 | 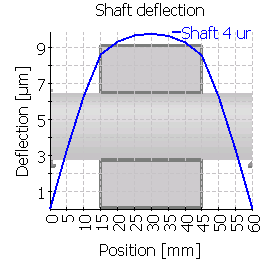 |
 |
| 5 | 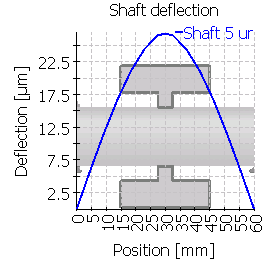 |
 |
| 6 | 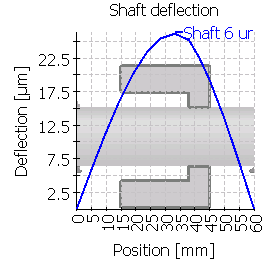 |
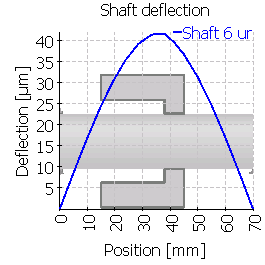 |
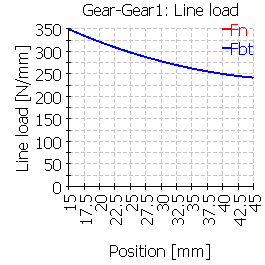
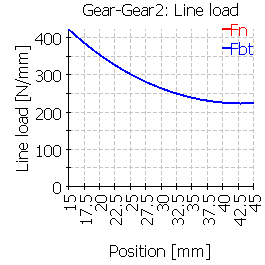
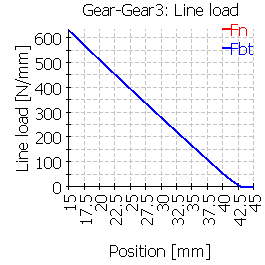
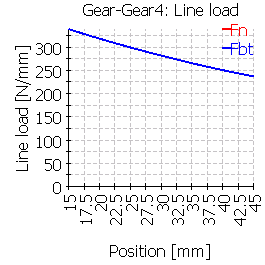
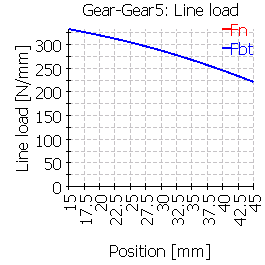
Folgende Tabelle stellt die Linienlastverteilung für die sechs Fälle mit zentrischem und exzentrischem Zahnrad dar:
| Linienlast | Zentrisches Zahnrad | Exzentrisches Zahnrad |
|---|---|---|
| 1 | 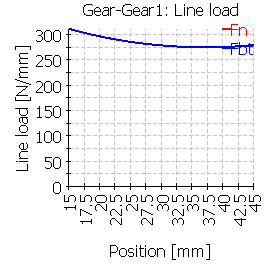 |
 |
| 2 | 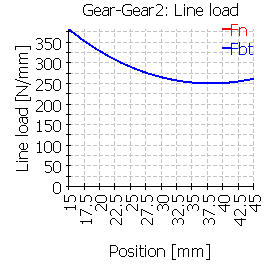 |
 |
| 3 | 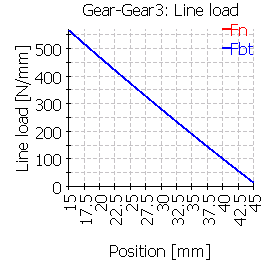 |
 |
| 4 | 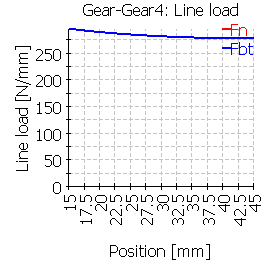 |
 |
| 5 | 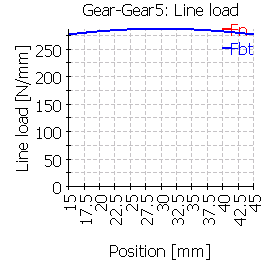 |
 |
| 6 | 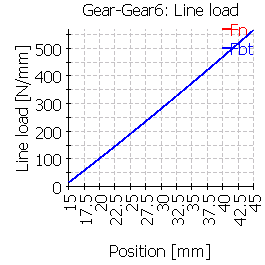 |
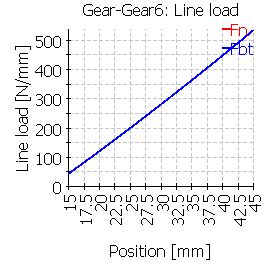 |
Im Vergleich von Fall 4 und 5 erkennt man den kleinen Einfluss des Torsionsmomentes. Während in Fall 4 mit dem Vollzylinder das Drehmoment von links wirkt, geben bei Stegrad die Aussenseiten durch Torsion und Biegung etwas nach. Das wirkt wie eine kleine Balligkeit.
Die Fälle 3 und 6 zeigen eine grosse Flankenlinienabweichung durch das Verkippen. Der Hauptgrund ist hier nicht die Verformung des Radkörpers selbst, sondern die Kopplung an der Welle an einer Stelle mit grossem Neigungswinkel. Der Neigungswinkel der Welle und die Verformung des Radkörpers tragen beide zu den gesamten Flankenlinienabweichungen bei während bei den anderen Fällen ein kleiner Neigungswinkel der Welle wirksam wird.
Mit einem detaillierterem Berechnungsmodell für den Radkörper können bessere Resultate sowohl für die Berechnung der Biegelinie der Welle als auch für dir Flankenlinienabweichungen von Verzahnungen erzielt werden. Im Fall einer Berechnung mit einfachen Balkenelementen, sollte der Aussendurchmesser des Radkörpers für die Berechnung von Flankenliniendeformationen verwendet werden. Für die Berechnung der Biegelinie der Welle kann dagegen ein kleinerer Durchmesser für den Radkörper verwendet werden, der besser zur Wellensteifigkeit passt.
Nach einer einmaligen statischen Reduktion des Radkörpers, die hier etwa 1 Minute braucht, benötigt die Berechnung nur Sekunden, wie für eine Berechnung mit Balkenelementen. Der einzige Nachteil der 3D-elastischen Bauteile ist eine Vergrösserung der gespeicherten Berechnungsdateien.
In diesen Beispielen wurden keine Verzahnungskorrekturen verwendet um den Effekt der Verformungen auf die Linienlastverteilungen zu zeigen. Selbstverständlich lässt sich die Berechnung auch mit Verzahnungskorrekturen durchführen.