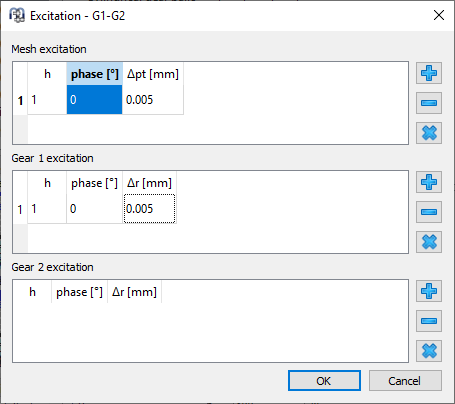
원통형 기어 쌍의 경우 세 가지 유형의 가진을 정의할 수 있습니다:
•메시 가진은 접촉 경로에 정의됩니다. 피치 오차는 기어 메시 진동수를 기반으로 한 가진으로 이어집니다. 하모닉 입력을 사용하여 더 높은 차수를 정의할 수 있습니다.
•기어 1의 진원도 오차에 기반한 가진을 정의할 수 있습니다. 여기에서는 반경의 변화가 사용됩니다. 기본 진동수는 기어의 회전 속도입니다.
•기어 2의 진원도 오차에 기반한 가진도 기어 1과 마찬가지로 정의할 수 있습니다.
여기는 하모닉 응답 계산에 고려됩니다. 준정적 연산 결과에 영향을 미치지 않으며 기어의 안전율에 영향을 미치지 않습니다.